TD 1: Single Layer Perceptron#
Goals:
check that everyone can run a notebook with appropriate config
play around with the single-layer perceptron
Hédi Hadiji, with bits from Odalric Ambryn-Maillard.
December 2023
# Imports
import sys
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import numpy as np
import random
from copy import deepcopy
import time
import matplotlib.pyplot as plt
If necessary: install pytorch by running
pip3 install torch
(in a a virtual environment)
print(f"python --version = {sys.version}")
print(f"torch.__version__ = {torch.__version__}")
print(f"np.__version__ = {np.__version__}")
python --version = 3.9.18 (main, Sep 11 2023, 08:25:10)
[Clang 14.0.6 ]
torch.__version__ = 2.2.1
np.__version__ = 1.26.4
Torch 101#
“The torch package contains data structures for multi-dimensional tensors and defines mathematical operations over these tensors. Additionally, it provides many utilities for efficient serializing of Tensors and arbitrary types, and other useful utilities. […] provides classes and functions implementing automatic differentiation of arbitrary scalar valued functions.” PyTorch
Variable types#
# Very similar syntax to numpy.
zero_torch = torch.zeros((3, 2))
print('zero_torch is of type {:s}'.format(str(type(zero_torch))))
# Torch -> Numpy: simply call the numpy() method.
zero_np = np.zeros((3, 2))
assert (zero_torch.numpy() == zero_np).all()
# Numpy -> Torch: simply call the corresponding function on the np.array.
zero_torch_float = torch.FloatTensor(zero_np)
print('\nFloat:\n', zero_torch_float)
zero_torch_int = torch.LongTensor(zero_np)
print('Int:\n', zero_torch_int)
zero_torch_bool = torch.BoolTensor(zero_np)
print('Bool:\n', zero_torch_bool)
# Reshape
print('\nView new shape...', zero_torch.view(1, 6))
# Note that print(zero_torch.reshape(1, 6)) would work too.
# The difference is in how memory is handled (view imposes contiguity).
# Algebra
a = torch.randn((3, 2))
b = torch.randn((3, 2))
print('\nAlgebraic operations are overloaded:\n', a, '\n+\n', b, '\n=\n', a+b )
# More generally, torch shares the syntax of many attributes and functions with Numpy.
zero_torch is of type <class 'torch.Tensor'>
Float:
tensor([[0., 0.],
[0., 0.],
[0., 0.]])
Int:
tensor([[0, 0],
[0, 0],
[0, 0]])
Bool:
tensor([[False, False],
[False, False],
[False, False]])
View new shape... tensor([[0., 0., 0., 0., 0., 0.]])
Algebraic operations are overloaded:
tensor([[ 1.0182, -0.6023],
[-0.4773, -1.3301],
[-2.4343, 0.6200]])
+
tensor([[ 0.6202, 0.7213],
[ 1.7796, -0.3127],
[-0.1968, 0.1540]])
=
tensor([[ 1.6383, 0.1190],
[ 1.3023, -1.6428],
[-2.6311, 0.7741]])
Gradient management#
# torch.Tensor is a similar yet more complicated data structure than np.array.
# It is basically a static array of number but may also contain an overlay to
# handle automatic differentiation (i.e keeping track of the gradient and which
# tensors depend on which).
# To access the static array embedded in a tensor, simply call the detach() method
print(zero_torch.detach())
# When inside a function performing automatic differentiation (basically when training
# a neural network), never use detach() otherwise meta information regarding gradients
# will be lost, effectively freezing the variable and preventing backprop for it.
# However when returning the result of training, do use detach() to save memory
# (the naked tensor data uses much less memory than the full-blown tensor with gradient
# management, and is much less prone to mistake such as bad copy and memory leak).
# We will solve theta * x = y in theta for x=1 and y=2
x = torch.ones(1)
y = 2 * torch.ones(1)
# Actually by default torch does not add the gradient management overlay
# when declaring tensors like this. To force it, add requires_grad=True.
theta = torch.randn(1, requires_grad=True)
# Optimisation routine
# (Adam is a sophisticated variant of SGD, with adaptive step).
optimizer = optim.Adam(params=[theta], lr=.1)
# Loss function
print('Initial guess:', theta.detach())
for _ in range(100):
# By default, torch accumulates gradients in memory.
# To obtain the desired gradient descent beahviour,
# just clean the cached gradients using the following line:
optimizer.zero_grad()
# Quadratic loss (* and ** are overloaded so that torch
# knows how to differentiate them)
loss = (y - theta * x) ** 2
# Apply the chain rule to automatically compute gradients
# for all relevant tensors.
loss.backward()
# Run one step of optimisation routine.
optimizer.step()
print('Final estimate:', theta.detach())
print('The final estimate should be close to', y)
tensor([[0., 0.],
[0., 0.],
[0., 0.]])
Initial guess: tensor([2.2107])
Final estimate: tensor([1.9999])
The final estimate should be close to tensor([2.])
Setting up a Perceptron experiment#
1 - Data#
class ToyLinearData():
"""
Toy dataset generating linearly separable data with margin gamma.
"""
def __init__(self, n, d, gamma=0, w=None):
self.n = n
self.d = d
self.gamma = gamma
if w is None:
w = torch.normal(torch.zeros(d))
self.w = w / torch.linalg.norm(w)
self.features = torch.zeros((n, d))
self.labels = torch.zeros((n))
self.max_norm = 0
self.w_margin = 1e10
self.fill_data()
def fill_data(self):
for i in range(self.n):
x, y = self.new_example()
self.features[i, :] = x
self.labels[i] = y
self.max_norm = max(torch.norm(x), self.max_norm)
self.w_margin = min(abs(torch.dot(self.w, x)), self.w_margin)
def new_example(self):
"""
Generates a gaussian vector with zero mean and identity / sqrt(d) covariance, then
moves it in the direction of w or in the opposite direction, to guarantee margin.
"""
# Gaussian vectors typically have norm around sqrt(d), so we normalise
x = torch.normal(torch.zeros(self.d)) / np.sqrt(self.d)
value = torch.dot(x, self.w)
if value >= 0:
x = x + self.gamma * self.w
y = 1
elif value < 0:
x = x - self.gamma * self.w
y = -1
return x, y
def __len__(self):
return self.n
class ToySphericalData:
"""
Generate toy data that is not linearly separable
"""
def __init__(self, n, d, max_rad=1, threshold_rad=.5):
self.n = n
self.d = d
self.features = torch.zeros((n, d))
self.labels = torch.zeros((n))
self.max_rad = max_rad
self.threshold_rad = threshold_rad
self.fill_data()
def fill_data(self):
for i in range(self.n):
r = np.random.rand() * self.max_rad
x = torch.normal(torch.zeros(d))
x = r / torch.norm(x) * x
self.features[i, :] = x
if r > self.threshold_rad:
self.labels[i] = 1
else:
self.labels[i] = -1
def __len__(self):
return self.n
def plot_data(data):
'Scatter plot for d = 2. Quite slow'
for i in range(len(data)):
if data.labels[i] == 1:
plt.scatter(data.features[i][0], data.features[i][1], color='blue')#, label='+1')
else:
plt.scatter(data.features[i][0], data.features[i][1], color='red')#, label='-1')
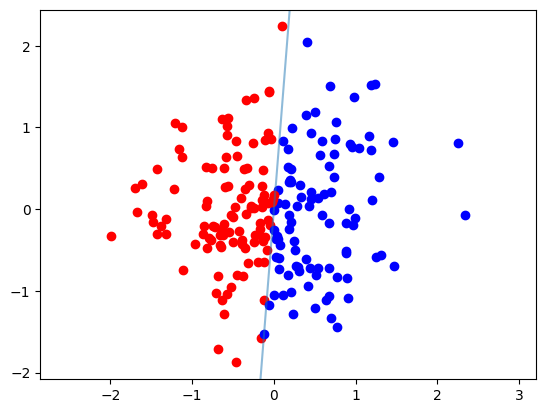
n = 200
d = 2
gamma = 0
data = ToyLinearData(n, d, gamma=gamma)
print(f'Margin of w : {data.w_margin: .4f}')
print(f'Max norm : {data.max_norm: .4f}')
print(f'True w : {data.w}')
plot_data(data)
plt.axline((0, 0), slope=-data.w[0] / data.w[1], color='C0', alpha=.5, label='True Hyperplane')
plt.axis('equal')
Margin of w : 0.0003
Max norm : 2.3916
True w : tensor([ 0.9969, -0.0788])
(-2.208884280920029,
2.5589091002941133,
-2.0815599977970125,
2.441225749254227)
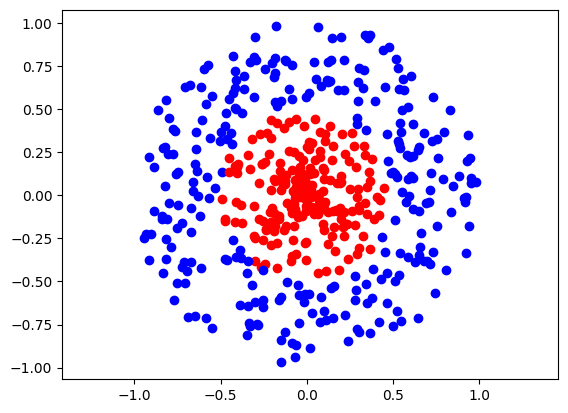
n = 500
d = 2
data = ToySphericalData(n, d)
plot_data(data)
plt.axis('equal')
(-1.0394978940486908,
1.0771204650402069,
-1.0675497114658357,
1.0754001200199128)
2 - Implementing the Perceptron#
class Perceptron():
"""
Single-layer Perceptron
"""
def __init__(self, dim):
self.dim = dim
self.w = torch.zeros(dim)
self.margin_mistake_counter = 0
def predict(self, x):
if torch.dot(self.w, x) > 0:
return 1
else:
return -1
def update_margin_mistake(self, x, y):
self.w += y * x
self.margin_mistake_counter += 1
def train_perceptron(alg, data, t_lim=100_000):
converged = False
t = 0
while not (converged) and t < t_lim:
shuffled_indices = np.arange(len(data))
#np.random.shuffle(shuffled_indices)
clean_pass = True
for i in shuffled_indices:
if torch.dot(alg.w, x) * y < 1:
alg.update_margin_mistake(x, y)
clean_pass = False
t += 1
if clean_pass:
converged = True
return converged
File <tokenize>:10
alg.update_margin_mistake(x, y)
^
IndentationError: unindent does not match any outer indentation level
n = 100
d = 2
gamma = .5
data = ToyLinearData(n, d, gamma=gamma)
alg = Perceptron(d)
3 - Testing the Perceptron#
n = 100
d = 2
gamma = 0.1
data = ToyLinearData(n, d, gamma=gamma)
alg = Perceptron(d)
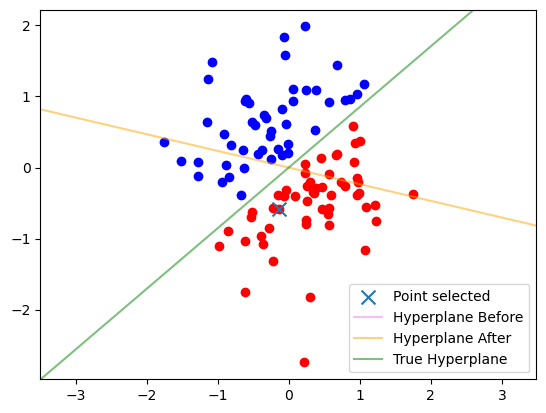
Run the code below a few times to see how the Perceptron behaves.#
You can restart and initialize the algorithm again by running the cell above.
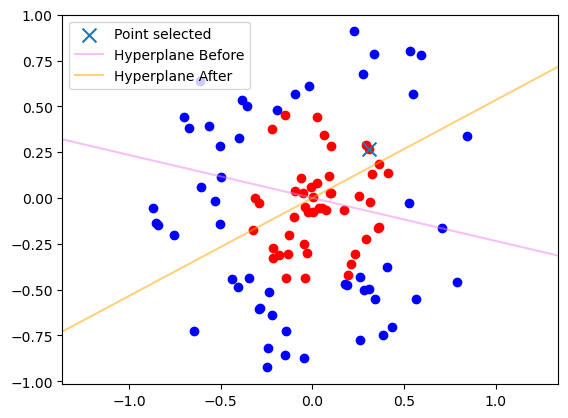
plot_data(data)
i = np.random.randint(len(data))
x, y = data.features[i], data.labels[i]
plt.scatter(x[0], x[1], marker='x', s=100, label='Point selected')
plt.axline((0, 0), slope=-alg.w[0] / alg.w[1], color='violet', alpha=.5, label='Hyperplane Before')
if torch.dot(alg.w, x) * y < 1:
alg.update_margin_mistake(x, y)
print('Point selected leads to a margin mistake')
else:
print('Point selected is well classified with a margin: no update')
plt.axline((0, 0), slope=-alg.w[0] / alg.w[1], color='orange', alpha=.5, label='Hyperplane After')
plt.axline((0, 0), slope=-data.w[0] / data.w[1], color='green', alpha=.5, label='True Hyperplane')
print('Normalized Alg w :', alg.w / torch.norm(alg.w))
print('True w: ', data.w)
plt.legend()
plt.axis('equal')
plt.show()
Point selected leads to a margin mistake
Normalized Alg w : tensor([0.2283, 0.9736])
True w: tensor([-0.6492, 0.7607])
Non-separable data#
n, d = 100, 2
data = ToySphericalData(n, d)
plot_data(data)
i = np.random.randint(len(data))
x, y = data.features[i], data.labels[i]
plt.scatter(x[0], x[1], marker='x', s=100, label='Point selected')
plt.axline((0, 0), slope=-alg.w[0] / alg.w[1], color='violet', alpha=.5, label='Hyperplane Before')
if torch.dot(alg.w, x) * y < 1:
alg.update_margin_mistake(x, y)
print('Point selected leads to a margin mistake')
else:
print('Point selected is well classified with a margin: no update')
plt.axline((0, 0), slope=-alg.w[0] / alg.w[1], color='orange', alpha=.5, label='Hyperplane After')
print('Alg w :', alg.w)
#print('True w: ', data.w)
plt.legend()
plt.axis('equal')
plt.show()
Point selected leads to a margin mistake
Alg w : tensor([-0.1714, 0.3209])
Just run the algorithm in higher dim to check#
n, d, gamma = 100, 2, 0
data = ToyLinearData(n, d, gamma=gamma)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=1_000_000)
print(f'Converged: {converged}')
print(alg.w / torch.norm(alg.w))
print(data.w)
Converged: True
tensor([0.6950, 0.7190])
tensor([0.6299, 0.7767])
n, d = 200, 10
data = ToySphericalData(n, d)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=100_000)
print(f'Converged: {converged}')
print(alg.w / torch.norm(alg.w), torch.norm(alg.w))
Converged: False
tensor([-0.3983, 0.5476, 0.0862, -0.0950, 0.4477, -0.0551, -0.2822, -0.2792,
0.2330, -0.3312]) tensor(4.4352)
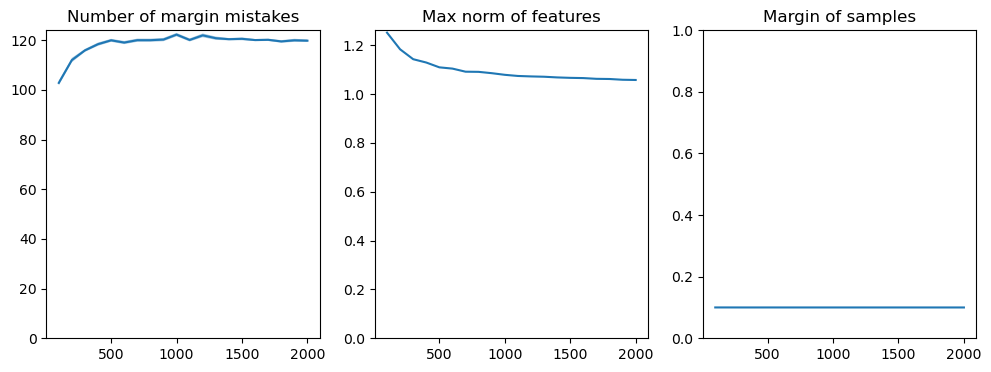
2 - Optimization of the Perceptron#
ds = [100 * (i+1) for i in range(20)]
n_ds = len(ds)
N_mc = 20
all_mistakes = np.zeros((n_ds, N_mc))
n = 1000
gamma = .1
norms = np.zeros((n_ds, N_mc))
margins = np.zeros((n_ds, N_mc))
all_converged = True
for i, d in enumerate(ds):
for j in range(N_mc):
data = ToyLinearData(n, d, gamma=gamma)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=100_000)
if not (converged):
print('Perceptron did not converge')
all_converged = converged and all_converged
all_mistakes[i, j] = alg.margin_mistake_counter
norms[i, j] = data.max_norm
margins[i, j] = data.w_margin
avg_mistakes = np.mean(all_mistakes, axis=1)
std_mistakes = np.std(all_mistakes, axis=1) / np.sqrt(N_mc)
fig, axs = plt.subplots(1, 3, figsize=(12, 4))
axs[0].set_title('Number of margin mistakes')
axs[0].plot(ds, avg_mistakes )
axs[0].fill_between(ds, (avg_mistakes - std_mistakes), (avg_mistakes + std_mistakes), alpha=0.4)
axs[0].set_ylim(0)
axs[1].set_title('Max norm of features')
axs[1].plot(ds, np.mean(norms, axis=1))
axs[2].set_title('Margin of samples')
mean_margins = np.mean(margins, axis=1)
axs[2].plot(ds, mean_margins)
axs[1].set_ylim(0)
axs[2].set_ylim(0, max(1, max(mean_margins)))
plt.show()
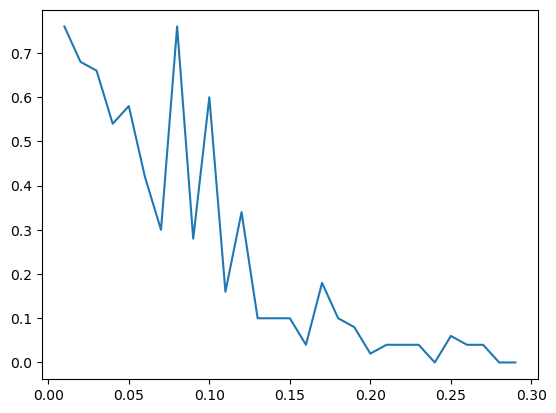
2- Generalization#
n = 10
d = 10
gamma = .1
data = ToyLinearData(n, d, gamma=gamma)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=100_000)
def test(alg, data, N_test):
'''
Generates a test set and returns the average
error on this test set.
'''
score = torch.zeros(N_test)
for j in range(N_test):
x, y = data.new_example()
score[j] = alg.predict(x) * y
return 1 - torch.mean(score)
gammas = [.01 * i for i in range(1,30)]
n_train = 10
d = 50
n_gammas = len(gammas)
N_test = 100
errors = torch.zeros(n_gammas)
for i, gamma in enumerate(gammas):
data = ToyLinearData(n_train, d, gamma=gamma)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=1_000_000)
if not (converged):
print('Perceptron did not converge')
errors[i] = test(alg, data, N_test)
plt.plot(np.array(gammas), errors)
plt.show()
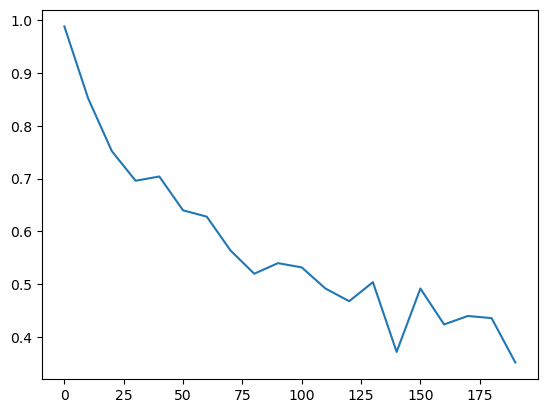
n_trains = [10 * i for i in range(20)]
d = 100
gamma = 0.0
number_of_trainings = len(n_trains)
N_test = 500
errors = torch.zeros(number_of_trainings)
for i, n_train in enumerate(n_trains):
data = ToyLinearData(n_train, d, gamma=gamma)
alg = Perceptron(d)
converged = train_perceptron(alg, data, t_lim=1_000_000)
if not (converged):
print('Perceptron did not converge')
errors[i] = test(alg, data, N_test)
plt.plot(n_trains, errors)
[<matplotlib.lines.Line2D at 0x1652f1c10>]